

Brazo manipulador de manipulación de bloques industriales, equipo de manipulación de materiales de succión magnética, elevación de acero, 100kg
Descripción general Tamaño del paquete 220.00 cm * 120.00 cm * 120.00 cm Peso bruto del paquete 500.000 kg INTRODUCCIÓN ;
Overview
PIEZAS Y ESTRUCTURA
Partes principales del manipulador
1. Columna2. Cilindro3. Tanque de aire4. Caja de control5. Mango 6. Estructura de herramientas7. Freno de articulación
Manipulador con brazo rígido: La ventaja de este manipulador es que logrará un control de posición y ángulo más preciso, lo cual es adecuado para situaciones donde la precisión de la posición de instalación es relativamente alta. Manipulador con cable: La ventaja de la estructura de cable blando es que es más flexible. Es adecuado para situaciones en las que la posición y el ángulo de instalación no son estrictamente necesarios y se requiere un ajuste manual.
FORMA DE INSTALACIÓN
ESCENARIO DE TRABAJO
Información básica.
| Certificación | YO ASI |
| Modo de control | Control de ruta continua |
| Modo conductor | Neumático |
| Condición | Nuevo |
| Solicitud | Carga |
| Componente principal | Brazo de potencia, accesorio, sistema de control, sistema de seguridad |
| Altura máxima | 3500 mm, personalizado |
| Diseño básico | Agarrar, transportar, levantar, rotar |
| Formulario de instalación | Instalación en tierra, personalizada |
| Trazo arriba y abajo | 0-1600 mm, personalizado |
| Radio de trabajo | 2500-3000 mm, personalizado |
| Capacidad | 100 kg, personalizado |
| Tipo | Manipulador asistido eléctricamente, robot de agarre |
| Paquete de transporte | Caja de madera |
| Especificación | Personalizado |
| Marca comercial | escott |
| Origen | Porcelana |
| Código hs | 8428909090 |
| Capacidad de producción | 100PCS/Mes |
Empaquetado y entrega
Tamaño del paquete 220.00cm * 120.00cm * 120.00cm Peso bruto del paquete 500.000kgDescripción del Producto
INTRODUCCIÓN GENERALEl manipulador industrial es un conjunto de equipos de manipulación asistida diseñados en base a la dinámica y la ergonomía, y su modo de operación es mediante la operación manual de un botón, mediante el agarre del útil del accesorio para lograr la acción de transferencia del objeto.
Los escenarios de aplicación generales incluyen principalmente:1. El objeto objetivo es demasiado pesado o demasiado grande para lograr un manejo manual2. El ángulo de transferencia y la posición del objeto objetivo son difíciles de lograr manualmente3. Es fácil que el objeto objetivo cause grandes pérdidas mediante la transferencia manual4. Es fácil que el objeto objetivo cause una gran pérdida de mano de obra. Según la situación anterior, introdujimos el robot como una herramienta de manipulación auxiliar para resolver el problema a la perfección. En este proceso, los objetos irregulares, pesados y especiales han logrado una transferencia eficiente, ahorrando y protegiendo la pérdida de mano de obra, y se han utilizado cada vez más en el proceso de producción industrial.PIEZAS Y ESTRUCTURA
Partes principales del manipulador
1. Columna2. Cilindro3. Tanque de aire4. Caja de control5. Mango 6. Estructura de herramientas7. Freno de articulación

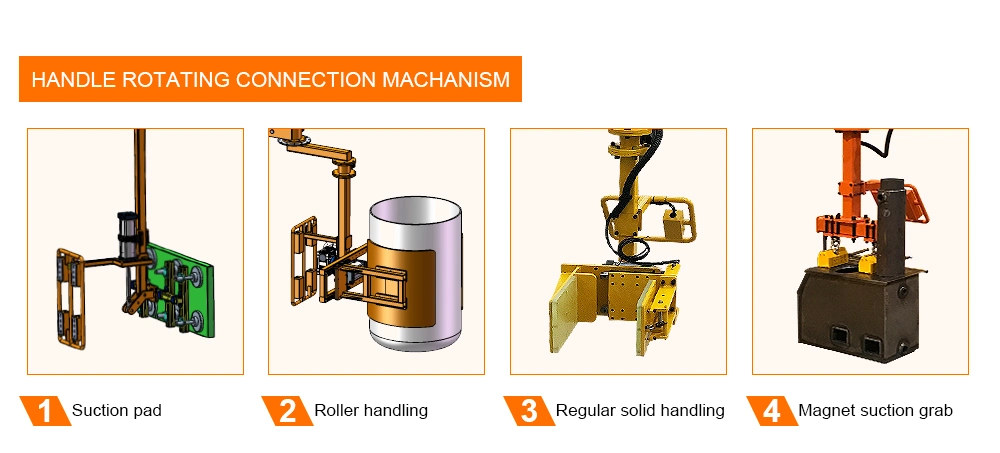
Manipulador con brazo rígido: La ventaja de este manipulador es que logrará un control de posición y ángulo más preciso, lo cual es adecuado para situaciones donde la precisión de la posición de instalación es relativamente alta. Manipulador con cable: La ventaja de la estructura de cable blando es que es más flexible. Es adecuado para situaciones en las que la posición y el ángulo de instalación no son estrictamente necesarios y se requiere un ajuste manual.
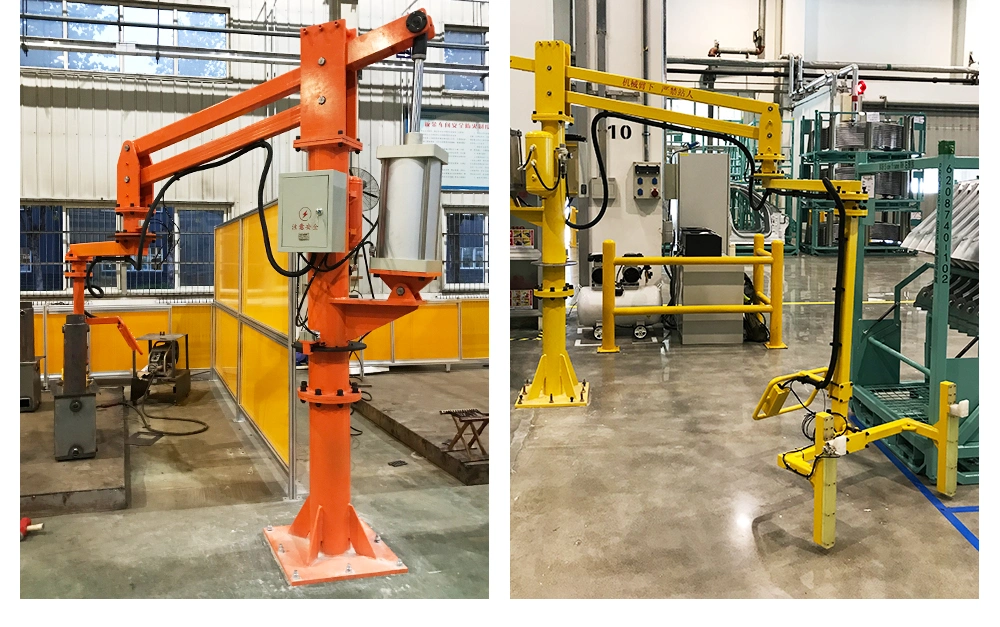
FORMA DE INSTALACIÓN
- Columna fija
- Columna móvil
- Techo fijo (instalación en pared)
- Corriendo por encima (mediante carro deslizante)
| N º de Modelo | Estructura de diseño | Dibujos de diseño | Altura de elevación | Radio | Capacidad | Método de fijación | Enlace |
| ES-50RS-QH | con cable blando | 2500 mm | 2500 mm | 50 kg | Columna fija | ||
| ES-60YB-QD | Brazo rígido | 2800 mm | 3000 mm | 60 kg | Columna móvil | ||
| ES-100RS-TS | Brazo plegado con cable blando | 3000 mm | 3000 mm | 100 kg | Columna fija | ||
| ES-200KG-YB | Brazo Rígido con Ventosa | 3400 mm | 3500 mm | 200 kg | Gastos generales fijos | ||
| ES-300KG-MYB | Brazo rígido | 3000 mm | 2500 mm | 300KG | Techo móvil | ||
| ES-150KG-FLD | Diseño flexible | 1500 mm | ninguno | 150 kg | diseño con montacargas |
ESCENARIO DE TRABAJO


También te puede interesar


Enviar Consulta
Enviar ahora