
Mano biónica del manipulador de la automatización de la prensa de la chapa del brazo robótico barato de 4 ejes
Información básica.
| N º de Modelo. | HC415 |
| Origen | Porcelana |
Descripción del Producto
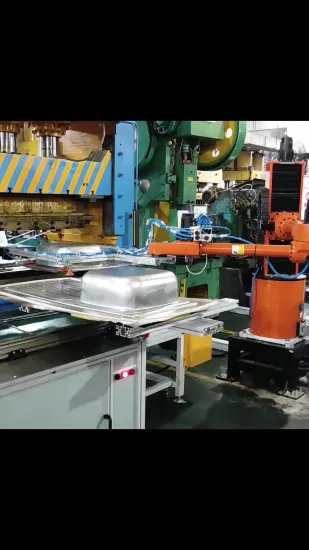
Descripción del ProductoEl brazo robótico de cuatro ejes del robot de estampado HCNC para la automatización de prensas de chapa es un robot de cuatro ejes de alta rigidez, que logra un bajo costo y un alto rendimiento con el mismo nivel de carga útil que otros robots. Es la mejor opción para la industria de estampado y manipulación. La carga útil del robot HCNC HC415 es de hasta 15 kg y el rango de movimiento es de 1402 mm.
Características- Diseñado especialmente para la industria de estampado y carga.
- Alta rigidez con material de hierro fundido. El robot pesa 250 kg, es estable y se adapta bien.
a las duras condiciones de trabajo de la industria del estampado. - El ciclo de vida es de hasta diez años y aporta un alto retorno de la inversión.
- Alta integración, interfaz de señal incorporada e interfaz de tubería de aire
- Fuerte suavidad y el tiempo de pausa del punto de transición es cercano a cero
| Robot industrial | HSR-HC415 | |
| Grado de libertad | 4 | |
| carga especificada | 15kg | |
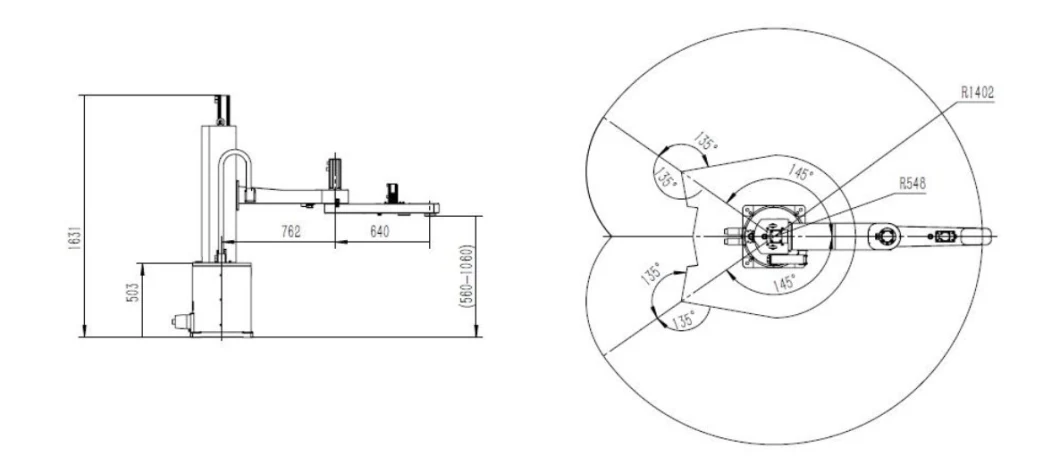
| Radio máximo de trabajo | 1402 mm | |
| Repetibilidad | ±0,05 mm | |
| Rango de movimiento | J1 | ±145° |
| J2 | ±135° | |
| J 3 | ±250 mm | |
| J4 | ±180° | |
| velocidad nominal | J1 | 225°/s, 3,93rad/s |
| J2 | 225°/s, 3,93rad/s | |
| J 3 | 500 mm/s | |
| J4 | 180°/s, 3,14 rad/s | |
| Velocidad máxima | J1 | 300°/s, 5,23 rad/s |
| J2 | 375°/s, 6,54 rad/s | |
| J 3 | 830 mm/s | |
| J4 | 360°/s, 6,28 rad/s | |
| Momento de inercia permitido | J4 | 3kg^2 |
| Torque permitido | J4 | 50N·m |
| Entorno aplicable | temperatura | 0~45° |
| humedad | 20%~80% | |
| otro | Evite el contacto con gases y líquidos inflamables, explosivos o corrosivos. Mantener alejado de fuentes de ruido electrónico (plasma). | |
| Longitud del cable del instructor | 8 metros | |
| Longitud de conexión carrocería-armario | 6 metros | |
| Parámetros de E/S | Digital: 32 entradas, 31 salidas (una para la salida del indicador de falla del gabinete de control) | |
| capacidad de la batería | 2,8kVA | |
| potencia nominal | 2,2kW | |
| Tensión nominal | TrifásicoAC380V | |
| Corriente nominal | 4A | |
| grado de protección | IP54 | |
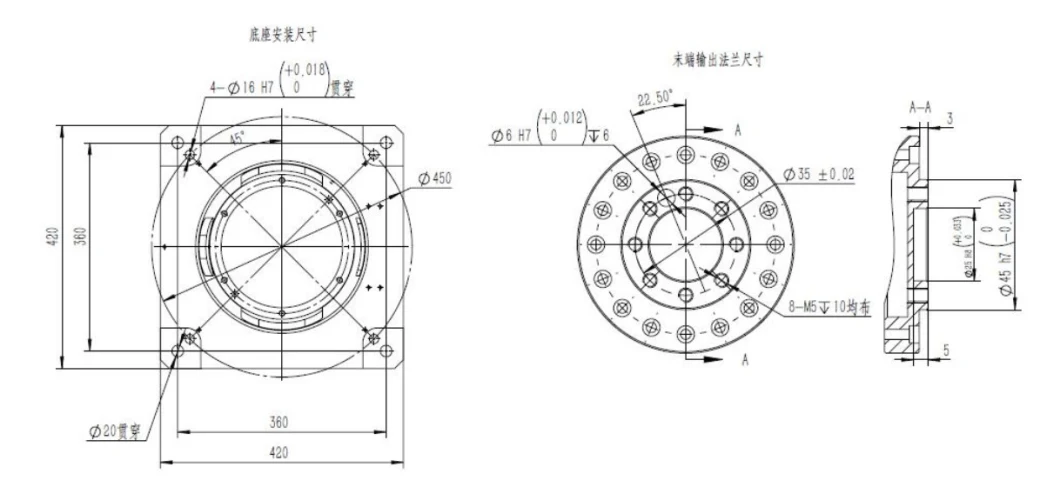
| Metodo de instalacion | Instalación en tierra | |
| Peso corporal | 250 kilos | |
| Grado de protección del armario de control | IP53 | |
| Tamaño del gabinete de control | 660 (ancho) × 450 (grueso) × 950 (alto) -vertical | |
| Peso del armario de control | 50 kilos | |


Huashu Robot es una de esas subsidiarias de HCNC. Se centra en la investigación y el desarrollo, la fabricación, la aplicación y el servicio de productos de robots industriales. Es el mejor contratista de ingeniería para soluciones de automatización de robots y el mejor proveedor de fabricación inteligente y soluciones generales de fábrica inteligente. Tiene 9 filiales en Foshan, Chongqing, Shenzhen, Dongguan, Ningbo, Suzhou, Quanzhou, Jiangyin, Nanning y 4 institutos de investigación en Foshan, Chongqing, Quanzhou y Changzhou, que cubren áreas importantes de toda China. La capacidad de producción anual es de 10.000 juegos de robots industriales. Huashu Robot implementa plenamente la estrategia de desarrollo "PCLC". En la actualidad, dominamos 4 componentes clave de los robots industriales y contamos con 6 series de más de 40 robots. Han logrado continuamente avances en electrodomésticos, electrónica, ferretería, automóviles y motocicletas, cocinas y baños, zapatería, baterías de litio, energía solar y logística FMGG. Nuestra influencia en el mercado se ha expandido rápidamente y ya tienen la capacidad de competir con marcas de robots internacionales famosas.

Preguntas más frecuentes
P1: ¿Cuál es el material de su robot industrial? R1: El material del robot industrial está compuesto por hierro fundido y aluminio fundido. P2: ¿El controlador de su robot tiene capacidades de entrada/salida? R2: Sí, nuestro controlador de robot tiene capacidades de entrada/salida. P3: ¿Cómo crear un programa para su robot industrial? R3: Hay dos formas de crear un programa para nuestro brazo robótico: a . Para facilitar el movimiento de desplazamiento, podemos utilizar el dispositivo portátil de enseñanza colgante para crear el programa. Adjunto el documento del pendiente docente para que podáis saber más al respecto. b. Para algunos movimientos complejos, podemos utilizar el software fuera de línea Interobot (desarrollado por Huashu Robot), que puede simular el movimiento del robot y facilitar la programación. P4: ¿Qué tipo de robot industrial tiene? R4: Tenemos un robot industrial de 6 series con más de 40 modelos que se pueden utilizar para recoger, soldar, esmerilar y pulir, clasificar, pintar, aplicaciones de inyección, carga y descarga de piezas para máquina herramienta, etc.P5: ¿Cuál es el tiempo de entrega de su producto?A5 : Nuestra capacidad de producción anual es de 10.000 juegos de robots. El período de entrega concreto debe confirmarse en función del número de pedidos.P6: ¿Por qué elegir Huashu Robot?R6: Huashu Robot cuenta con más de 1500 técnicos dedicados a la investigación y el desarrollo de sus productos. Las partes centrales del robot industrial, como el controlador robótico, el cuerpo del robot, el servomotor y el servoaccionamiento, las desarrollamos nosotros mismos, lo que puede ayudar a nuestros clientes a actualizar el sistema según sus necesidades. Además de proporcionar el robot, también podemos brindarle una solución completa, brindándole servicios integrales.P7: ¿Tienen un robot colaborativo?R7: Ya tenemos un robot colaborativo que puede recordar los puntos de movimiento arrastrando manualmente el brazo robótico. evitando el complicado proceso de programación. Este robot colaborativo se puede utilizar para tratamientos médicos y aplicaciones de soldadura.


